
|
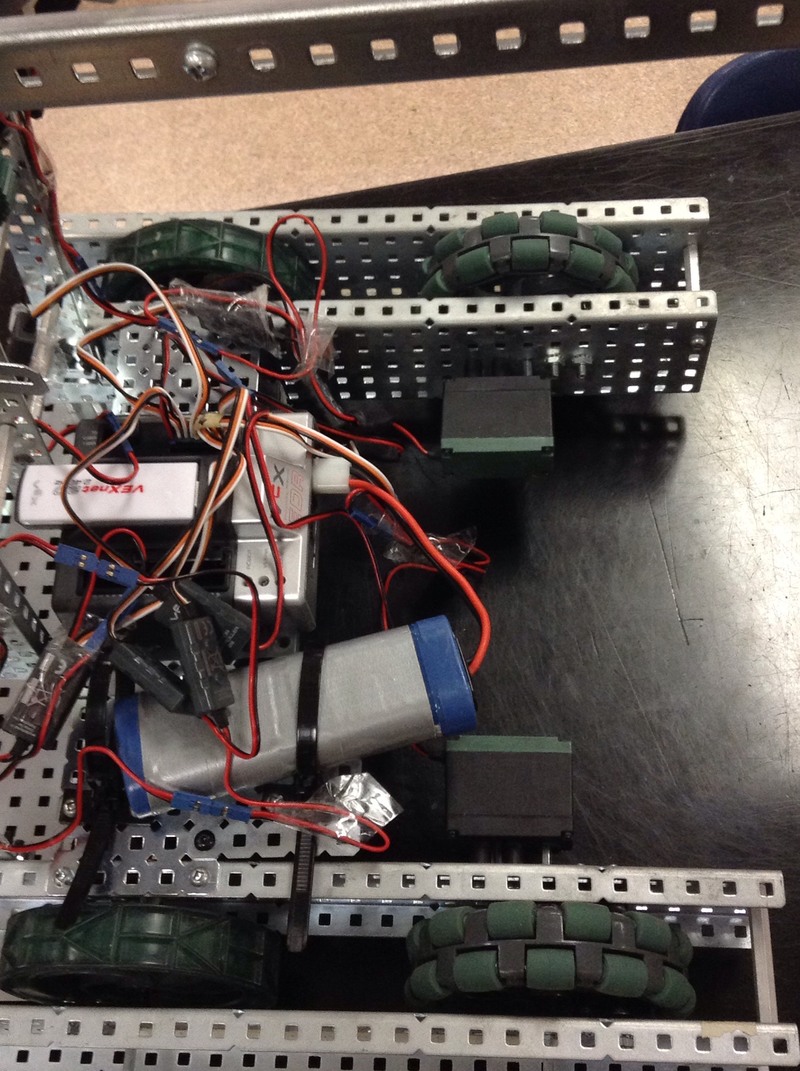
This time we changed the positioning of the micro-controller and the battery so when the claw came down, it wasn't hitting against that area of materials and inhibit the mobility of the claw.
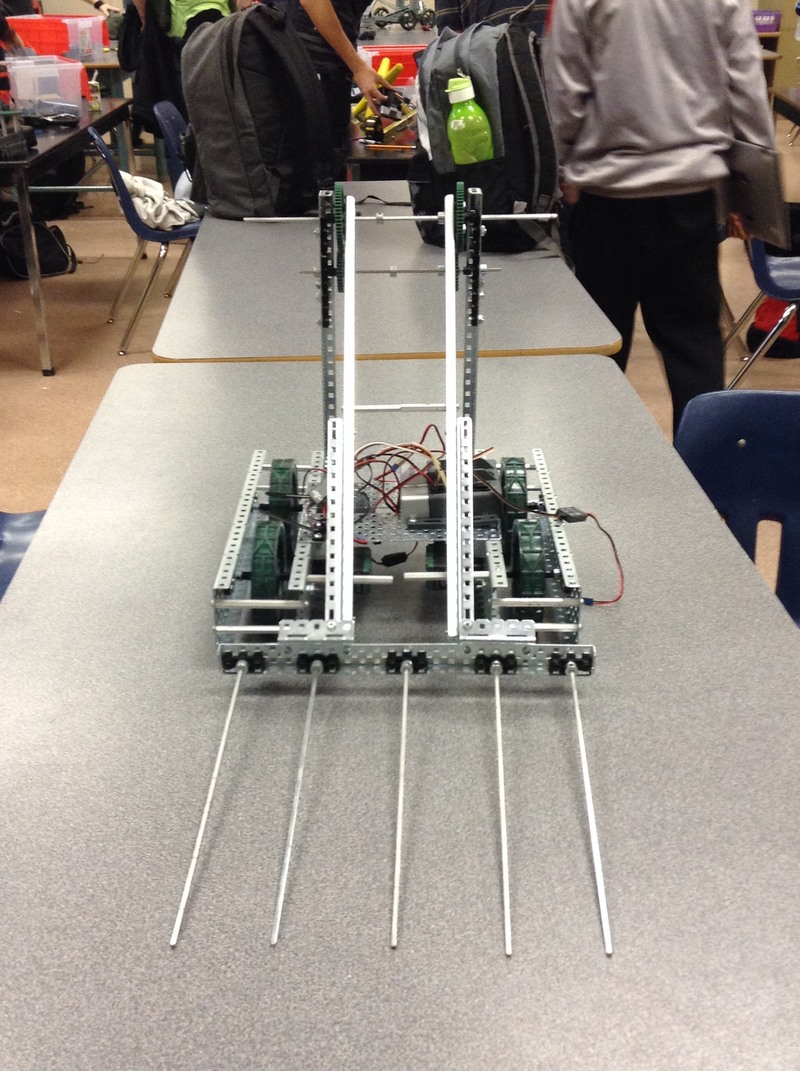
In the first picture the back end of the prongs closest to the robot are off the ground, making the prongs rub and mark up the playing surface.
0 Comments
|
AuthorWrite something about yourself. No need to be fancy, just an overview. ArchivesCategories |
 RSS Feed
RSS Feed
